














visit
Under the hood of Pixling World by@fredriknoren
5,896 reads
Under the hood of Pixling World
by Fredrik NorénSeptember 5th, 2018
Too Long; Didn't Read
This will be a look under the hood of <a href="//pixling.world/" target="_blank">Pixling World</a>, an <a href="//gzht888.com/tagged/artificial" target="_blank">artificial</a> life/evolution simulator/god simulator I’m building. As a player you take the role of an old-school deity, who gets to create his/her own world, put some creatures (“Pixlings”) into it and then breathe life into them. You can’t control the behavior of the creatures directly, as it’s evolved through real darwinian evolution over time, but as a god you can give them abilities to interact with each other and their environment. The goal is to create worlds that fascinate yourself and others.Companies Mentioned
This will be a look under the hood of , an artificial life/evolution simulator/god simulator I’m building. As a player you take the role of an old-school deity, who gets to create his/her own world, put some creatures (“Pixlings”) into it and then breathe life into them. You can’t control the behavior of the creatures directly, as it’s evolved through real darwinian evolution over time, but as a god you can give them abilities to interact with each other and their environment. The goal is to create worlds that fascinate yourself and others.
When I’ve been posting about it online ( and ) people have asked me “how does it work”, so I figured I’d give an overview in this blog post. First I’ll give a brief overview of the game, then I’ll talk about how neural network evolution works and finally I’ll get into the technical implementation of all this.
The game
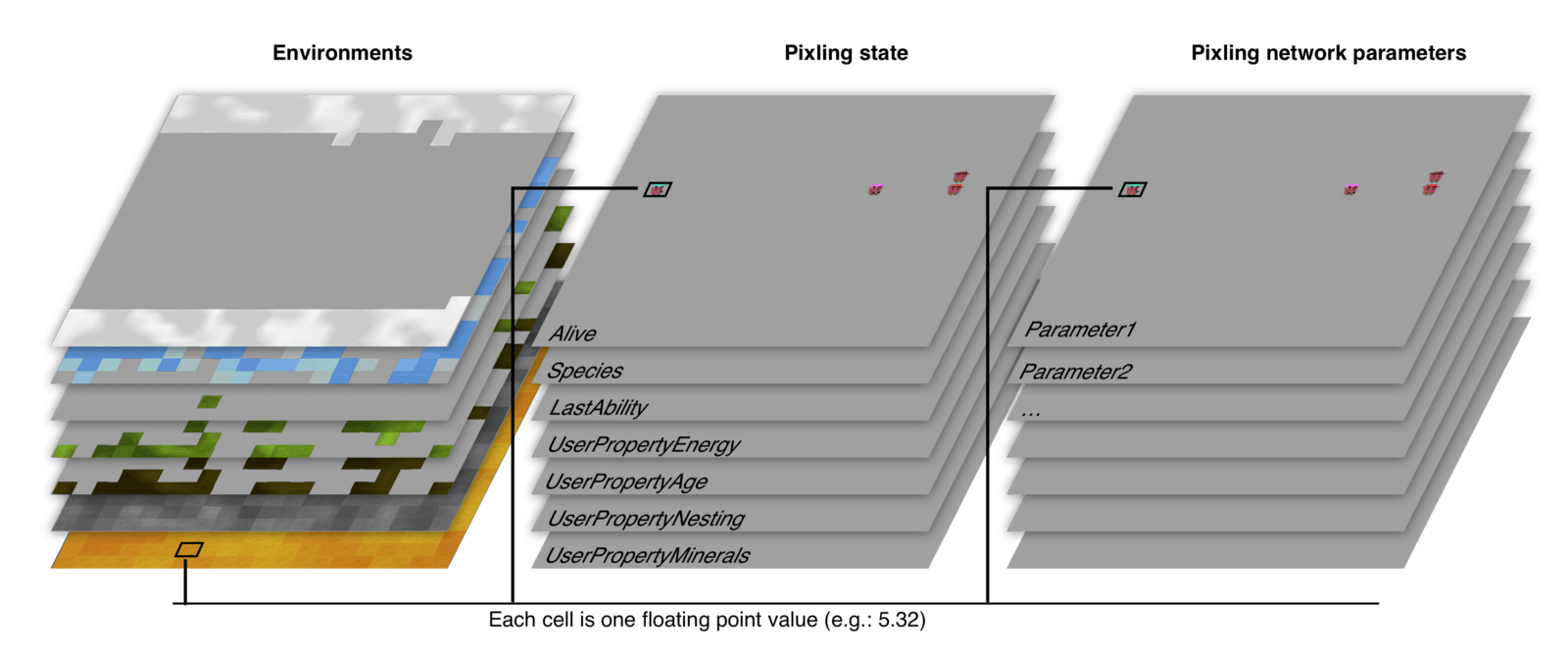
For anyone not familiar with the game, here’s what it looks like: The entire state consists of three textures: Environments, Pixling state and Pixling neural network parameters. Environments are defined by the user; one slice per environment. The Pixling state is a combination of predefined properties such as Alive, Species and LastAbility, and whatever properties the user define for the Pixlings such as Energy, DaysSinceBirthday, NumberOfFishInPocket etc. The Pixling neural network parameters are, as discussed above, evolved. Each texture is stored as a R32F 2d array textures in WebGL, i.e. textures with a width, height and depth and a single floating point value per texel. So for instance, the Magma environment at cell (x: 15, y: 23) has a value of 19.3. Or the Pixling state texture at (x: 4, y: 19) of the alive slice (index 0) has a value of 1, which means the Pixling of cell (x: 4, y: 19) is considered alive.Simulation
The overall simulation loop looks something like this: Each step:- Run all user defined environment computations
- Build inputs to neural networks
- Run forward pass on neural networks
- Run all user defined rules and abilities
- Handle movement and reproduction
Rendering
Once the simulation has run a step (or a number of steps if you’re on the Extreme speed setting), I render the results to the screen. Rendering looks something like this:
Sampling & Metrics
Another big area of the game is sampling and metrics. Sampling is what I use to keep track of species in the world; basically I now and then record the entire game state and figure out who is a descendant of whom in a web worker. Metrics is calculated by running a “reduce” Computation which takes a texture and halves it in size, each pixel being the sum of its parent four pixels. That’s repeated until the texture is small enough to be moved fairly quickly to the CPU (this is expensive so only happens every 100 steps). This is how I can count the population for instance.That’s all!
There’s a lot more I could write about Pixling World but perhaps this will be enough for a rough overview. There are also a lot of things I’m excited to try adding to Pixling World: (Pixlings with memory would be so cool), a way for Pixlings to “see” more of the world and have better control of their movement, some more game like things like items and traits, manual training of their neural networks (perhaps take control of one and use that for ) and much much more. If anyone is interested in either hearing more about any specific area of Pixling World, or have suggestions for ways to take it forward I’m all ears; drop a comment here or on the reddit thread. And finally, if you’re interested in trying the game you can do so at (alpha stage so expect some bugs weirdness).
Appendix
A challenge: Pixling Battlegrounds
In preparation of this article I was working on a world which I was hoping would exhibit some interesting behaviors, but rather than finishing it I realized it may be more fun to put it out as a “challenge”. So for anyone inclined; here’s a world you can try to see if you can complete: (fair warning: I have no idea if it’s possible to complete or not)Example of a Computation
This takes the output of the neural network (brainRes), computes the argmax of it and stores it in cellProperties (the Pixling state). Since it both reads and writes from cellProperties it’s double buffered and the result is automatically copied back to the back buffer. // GLSL code for this computation:
Dense layer code
This code generates a shader that can compute outputs for multiple nodes in the network at the same time (up to maxColorAttachments).
L O A D I N G
. . . comments & more!
. . . comments & more!






