visit
How to Structure a PyTorch ML Project With Google Colab and TensorBoard by@michael-li
3,282 reads
How to Structure a PyTorch ML Project With Google Colab and TensorBoard
by Michael LiFebruary 5th, 2020
Too Long; Didn't Read
This is a line-by-line guide on how to structure a PyTorch ML project from scratch using Google Colab and TensorBoard. We get our model from scratch for the Fashion-MNIST dataset from scratch. The code here can be used on Google. Colab Notebook and GitHub link below: #. You can build a fully functional neural network using Tensor computation alone, but this is not what this article is about. We’ll make use of the more powerful and convenientandclasses to quickly build our CNN.People Mentioned
Companies Mentioned
Let’s build a fashion-MNIST CNN, PyTorch style. This is A Line-by-line guide on how to structure a PyTorch ML project from scratch using Google Colab and TensorBoard
When it comes to frameworks in technology, one interesting thing is that from the very beginning, there always seems to be a variety of choices. But over time, the competitions will evolve into having only two strong contenders left. Cases in point being ‘PC vs Mac’, ‘iOS vs Android’, ‘React.js vs Vue.js’, etc. And now, we have ‘PyTorch vs TensorFlow’ in machine learning., backed by Google, is undoubtedly the front-runner here. Released in 2015 as an open-source machine learning framework, it quickly gained a lot of attention and acceptance, especially in industries where production readiness and deployment is key. is introduced much later by Facebook in 2017 but quickly gaining a lot of love from practitioners and researchers because of its dynamic computational graph and ‘’ style.(Source: )
Recent research by shows that PyTorch is doing great with researchers and TensorFlow is dominating the industry world:In 2019, the war for ML frameworks has two remaining main contenders: PyTorch and TensorFlow. My analysis suggests that researchers are abandoning TensorFlow and flocking to PyTorch in droves. Meanwhile in industry, Tensorflow is currently the platform of choice, but that may not be true for long. —The recent release of introduced PyTorch Mobile, quantization and other goodies that are all in the right direction to close the gap. If you are somewhat familiar with neural network basics but want to try PyTorch as a different style, then please read on. I’ll try to explain how to build a Convolutional Neural Network classifier from scratch for the Fashion-MNIST dataset using PyTorch. The code here can be used on Google Colab and Tensor Board if you don’t have a powerful local environment. Without further ado, let’s get started. You can find the Google Colab Notebook and GitHub link below:👽
Import
First, let’s import the necessary modules.# import standard PyTorch modules
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torch.utils.tensorboard import SummaryWriter # TensorBoard support
# import torchvision module to handle image manipulation
import torchvision
import torchvision.transforms as transforms
# calculate train time, writing train data to files etc.
import time
import pandas as pd
import json
from IPython.display import clear_output
torch.set_printoptions(linewidth=120)
torch.set_grad_enabled(True) # On by default, leave it here for claritytorch
torch torch.nntorch.optimtorchvision torch.nn and torch.nn.functional
(Source: on )
The
torch.nntorch.optim
torch.optimtorchvision
torchvision SummaryWriter (Tensor Board)
SummaryWriter We also imported some other utility modules like
timejsonpandasDataset
torchvision is a dataset of 's article images—consisting of a training set of 60,000 examples and a test set of 10,000 examples. Each example is a 28x28 grayscale image, associated with a label from 10 classes. We intendFashion-MNISTto serve as a direct drop-in replacement for the original for benchmarking machine learning algorithms. It shares the same image size and structure of training and testing splits. —Fashion-MNIST
(Source: Fashion MNIST Dataset — )
# Use standard FashionMNIST dataset
train_set = torchvision.datasets.FashionMNIST(
root = './data/FashionMNIST',
train = True,
download = True,
transform = transforms.Compose([
transforms.ToTensor()
])
)This doesn’t need much explanation. We specified the root directory to store the dataset, snatch the training data, allow it to be downloaded if not present at the local machine, and then apply the
transforms.ToTensordataset train_setNetwork
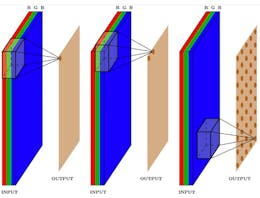
Building the actual neural network in PyTorch is fun and easy. I assume you have some basic concept of how a Convolutional Neural Network works. If you don’t, you can refer to this video from deeplizard:The Fashion MNIST is only 28x28 px in size, so we actually don’t need a very complicated network. We can just build a simple CNN like this:We have two convolution layers, each with 5x5 kernels. After each convolution layer, we have a max-pooling layer with a stride of 2. This allows us to extract the necessary features from the images. Then we flatten the tensors and put them into a dense layer, pass through a Multi-Layer Perceptron (MLP) to carry out the task of classification of our 10 categories.Now that we are clear about the structure of the network, let’s see how we can use PyTorch to build it:
# Build the neural network, expand on top of nn.Module
class Network(nn.Module):
def __init__(self):
super().__init__()
# define layers
self.conv1 = nn.Conv2d(in_channels=1, out_channels=6, kernel_size=5)
self.conv2 = nn.Conv2d(in_channels=6, out_channels=12, kernel_size=5)
self.fc1 = nn.Linear(in_features=12*4*4, out_features=120)
self.fc2 = nn.Linear(in_features=120, out_features=60)
self.out = nn.Linear(in_features=60, out_features=10)
# define forward function
def forward(self, t):
# conv 1
t = self.conv1(t)
t = F.relu(t)
t = F.max_pool2d(t, kernel_size=2, stride=2)
# conv 2
t = self.conv2(t)
t = F.relu(t)
t = F.max_pool2d(t, kernel_size=2, stride=2)
# fc1
t = t.reshape(-1, 12*4*4)
t = self.fc1(t)
t = F.relu(t)
# fc2
t = self.fc2(t)
t = F.relu(t)
# output
t = self.out(t)
# don't need softmax here since we'll use cross-entropy as activation.
return tFirst of all, all network classes in PyTorch expand on the base class:
nn.Module.parameters().zero_grad()The structure of our network is defined in the
__init__ def __init__(self):
super().__init__()
# define layers
self.conv1 = nn.Conv2d(in_channels=1, out_channels=6, kernel_size=5)
self.conv2 = nn.Conv2d(in_channels=6, out_channels=12, kernel_size=5)
self.fc1 = nn.Linear(in_features=12*4*4, out_features=120)
self.fc2 = nn.Linear(in_features=120, out_features=60)
self.out = nn.Linear(in_features=60, out_features=10)nn.Conv2dnn.Lineartorch.nn# define forward function
def forward(self, t):
# conv 1
t = self.conv1(t)
t = F.relu(t)
t = F.max_pool2d(t, kernel_size=2, stride=2)
# conv 2
t = self.conv2(t)
t = F.relu(t)
t = F.max_pool2d(t, kernel_size=2, stride=2)
# fc1
t = t.reshape(-1, 12*4*4)
t = self.fc1(t)
t = F.relu(t)
# fc2
t = self.fc2(t)
t = F.relu(t)
# output
t = self.out(t)
# don't need softmax here since we'll use cross-entropy as activation.
return tOnce the layer is defined, we can then use the layer itself to compute the forward results of each layer, coupled with the activation function(ReLu) and Max Pooling operations, we can easily write the forward function of our network as above. Notice that on
fc1t.reshapeHyperparameters
Normally, we can just handpick one set of hyperparameters and do some experiments with them. In this example, we want to do a bit more by introducing some structuring. We’ll build a system to generate different hyperparameter combinations and use them to carry out training ‘runs’. Each ‘run’ uses one set of hyperparameter combinations. Export the training data/results of each run to Tensor Board so we can directly compare and see which hyperparameters set performs the best.We store all our hyperparameters in an :# put all hyper params into a OrderedDict, easily expandable
params = OrderedDict(
lr = [.01, .001],
batch_size = [100, 1000],
shuffle = [True, False]
)
epochs = 3lrbatch_sizeshuffleOnce the parameters are down. We use two helper classes:
RunBuilder RunManager RunBuilder
The main purpose of the class
RunBuilder get_runsRunrun # import modules to build RunBuilder and RunManager helper classes
from collections import OrderedDict
from collections import namedtuple
from itertools import product
# Read in the hyper-parameters and return a Run namedtuple containing all the
# combinations of hyper-parameters
class RunBuilder():
@staticmethod
def get_runs(params):
Run = namedtuple('Run', params.keys())
runs = []
for v in product(*params.values()):
runs.append(Run(*v))
return runsRunManager
There are four main purposes of the
RunManager Calculate and record the duration of each epoch and run.Calculate the training loss and accuracy of each epoch and run.Record the training data (e.g. loss, accuracy, weights, gradients, computational graph, etc.) for each epoch and run, then export them into Tensor Board for further analysis.Save all training results in
csv json # Helper class, help track loss, accuracy, epoch time, run time,
# hyper-parameters etc. Also record to TensorBoard and write into csv, json
class RunManager():
def __init__(self):
# tracking every epoch count, loss, accuracy, time
self.epoch_count = 0
self.epoch_loss = 0
self.epoch_num_correct = 0
self.epoch_start_time = None
# tracking every run count, run data, hyper-params used, time
self.run_params = None
self.run_count = 0
self.run_data = []
self.run_start_time = None
# record model, loader and TensorBoard
self.network = None
self.loader = None
self.tb = None
# record the count, hyper-param, model, loader of each run
# record sample images and network graph to TensorBoard
def begin_run(self, run, network, loader):
self.run_start_time = time.time()
self.run_params = run
self.run_count += 1
self.network = network
self.loader = loader
self.tb = SummaryWriter(comment=f'-{run}')
images, labels = next(iter(self.loader))
grid = torchvision.utils.make_grid(images)
self.tb.add_image('images', grid)
self.tb.add_graph(self.network, images)
# when run ends, close TensorBoard, zero epoch count
def end_run(self):
self.tb.close()
self.epoch_count = 0
# zero epoch count, loss, accuracy,
def begin_epoch(self):
self.epoch_start_time = time.time()
self.epoch_count += 1
self.epoch_loss = 0
self.epoch_num_correct = 0
#
def end_epoch(self):
# calculate epoch duration and run duration(accumulate)
epoch_duration = time.time() - self.epoch_start_time
run_duration = time.time() - self.run_start_time
# record epoch loss and accuracy
loss = self.epoch_loss / len(self.loader.dataset)
accuracy = self.epoch_num_correct / len(self.loader.dataset)
# Record epoch loss and accuracy to TensorBoard
self.tb.add_scalar('Loss', loss, self.epoch_count)
self.tb.add_scalar('Accuracy', accuracy, self.epoch_count)
# Record params to TensorBoard
for name, param in self.network.named_parameters():
self.tb.add_histogram(name, param, self.epoch_count)
self.tb.add_histogram(f'{name}.grad', param.grad, self.epoch_count)
# Write into 'results' (OrderedDict) for all run related data
results = OrderedDict()
results["run"] = self.run_count
results["epoch"] = self.epoch_count
results["loss"] = loss
results["accuracy"] = accuracy
results["epoch duration"] = epoch_duration
results["run duration"] = run_duration
# Record hyper-params into 'results'
for k,v in self.run_params._asdict().items(): results[k] = v
self.run_data.append(results)
df = pd.DataFrame.from_dict(self.run_data, orient = 'columns')
# display epoch information and show progress
clear_output(wait=True)
display(df)
# accumulate loss of batch into entire epoch loss
def track_loss(self, loss):
# multiply batch size so variety of batch sizes can be compared
self.epoch_loss += loss.item() * self.loader.batch_size
# accumulate number of corrects of batch into entire epoch num_correct
def track_num_correct(self, preds, labels):
self.epoch_num_correct += self._get_num_correct(preds, labels)
@torch.no_grad()
def _get_num_correct(self, preds, labels):
return preds.argmax(dim=1).eq(labels).sum().item()
# save end results of all runs into csv, json for further analysis
def save(self, fileName):
pd.DataFrame.from_dict(
self.run_data,
orient = 'columns',
).to_csv(f'{fileName}.csv')
with open(f'{fileName}.json', 'w', encoding='utf-8') as f:
json.dump(self.run_data, f, ensure_ascii=False, indent=4)__init__: Initialize necessary attributes like count, loss, number of correct predictions, start time, etc.
begin_run: Record run start time so when a run is finished, the duration of the run can be calculated. Create a
SummaryWriter SummaryWriter end_run: When run is finished, close the SummaryWriter object and reset the epoch count to 0 (getting ready for next run).
begin_epoch: Record epoch start time so epoch duration can be calculated when epoch ends. Reset
epoch_loss epoch_num_correctend_epoch: This function is where most things happen. When an epoch ends, we’ll calculate the epoch duration and the run duration(up to this epoch, not the final run duration unless for the last epoch of the run). We’ll calculate the total loss and accuracy for this epoch, then export the loss, accuracy, weights/biases, gradients we recorded into Tensor Board. For ease of tracking within the Jupyter Notebook, we also created an OrderedDict object
results track_loss, track_num_correct, _get_num_correct: These are utility functions to accumulate the loss, number of correct predictions of each batch so the epoch loss and accuracy can be calculated later.
save: Save all run data (a list of
results csv json There is a lot to take in for this
RunManager Training
Finally, we are ready to do some training! With the help of our
RunBuilder RunManager m = RunManager()
# get all runs from params using RunBuilder class
for run in RunBuilder.get_runs(params):
# if params changes, following line of code should reflect the changes too
network = Network()
loader = torch.utils.data.DataLoader(train_set, batch_size = run.batch_size)
optimizer = optim.Adam(network.parameters(), lr=run.lr)
m.begin_run(run, network, loader)
for epoch in range(epochs):
m.begin_epoch()
for batch in loader:
images = batch[0]
labels = batch[1]
preds = network(images)
loss = F.cross_entropy(preds, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
m.track_loss(loss)
m.track_num_correct(preds, labels)
m.end_epoch()
m.end_run()
# when all runs are done, save results to files
m.save('results')First, we use
RunBuilder for run in RunBuilder.get_runs(params):Then, we create our
network Network network = Network()network We also need to create a
DataLoader batch_size loader = torch.utils.data.DataLoader(train_set, batch_size = run.batch_size)After that, we’ll create an optimizer using
torch.optimoptimoptimizer = optim.Adam(network.parameters(), lr=run.lr)We will loop through all the epochs we want (3 here) to train, so we wrap everything in an ‘epoch’ loop. We also use the
begin_run RunManager m.begin_run(run, network, loader)
for epoch in range(epochs):m.begin_epoch()
for batch in loader:
images = batch[0]
labels = batch[1]
preds = network(images)
loss = F.cross_entropy(preds, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
m.track_loss(loss)
m.track_num_correct(preds, labels)The above code is where real training happens. We read in the images and labels from the batch, use
network forward cross_entropy .zero_grad()loss.backward()track_loss track_num_correct RunManager Once all is finished, we’ll save the results in files using
m.save('results')Tensor Board
(Source: Tensorboard.org)
Tensor Board is a TensorFlow visualization tool now also supported by PyTorch. We’ve already taken the efforts to export everything into the ‘./runs’ folder where Tensor Board will be looking into for records to consume. What we need to do now is just to launch the Tensor Board and check. Since I’m running this model on Google Colab, we’ll use a service called
ngrok ngrok !wget //bin.equinox.io/c/4VmDzA7iaHb/ngrok-stable-linux-amd64.zip
!unzip ngrok-stable-linux-amd64.zipLOG_DIR = './runs'
get_ipython().system_raw(
'tensorboard --logdir {} --host 0.0.0.0 --port 6006 &'
.format(LOG_DIR)
)Launch
ngrok get_ipython().system_raw('./ngrok http 6006 &')! curl -s //localhost:4040/api/tunnels | python3 -c \
"import sys, json; print(json.load(sys.stdin)['tunnels'][0]['public_url'])"Conclusion
As you can see, PyTorch as a machine learning framework is flexible, powerful and expressive. You just write Python code. Since the main focus of this article is to showcase how to use PyTorch to build a Convolutional Neural Network and training it in a structured way, I didn’t finish the whole training epochs and the accuracy is not optimum. You can try it yourself and see how well the model performs.This article is heavily inspired by . Even most of the code snippets are directly copied from it. I’d like to thank them for the great content and if you feel the need to delve down deeper, feel free to go check it out and subscribe to their channel.Found this article useful? Follow me () on Medium or you can find me on Twitter or my blog site .
L O A D I N G
. . . comments & more!
. . . comments & more!