













































Jan 01, 1970
Optimalisering van voertuigvloei in komplekse rotondes: OD-korridors en gewenste oriëntasies deur@escholar
Optimalisering van voertuigvloei in komplekse rotondes: OD-korridors en gewenste oriëntasies
deur EScholar: Electronic Academic Papers for Scholars4m2024/09/02
Te lank; Om te lees
Die vraestel skets 'n strategie om OD-korridors te definieer en die gewenste oriëntasies te spesifiseer vir outomatiese voertuie wat komplekse rotondes navigeer. Dit kategoriseer OD-korridors op grond van bestemmingsigbaarheid en gebruik geweegde gemiddelde oriëntasies om kortste paddoeltreffendheid te balanseer met minimale afwyking van sirkelbeweging, wat veiligheid en verkeersvloei verbeter.Skrywers:
(1) Mehdi Naderi; (2) Markos Papageorgiou; (3) Dimitrios Troullinos; (4) Iasson Karafyllis; (5) Ioannis Papamichail.Tabel van skakels
Die nie-lineêre terugvoerbeheer
OD Korridors en Gewenste Oriëntasies
Grens- en Veiligheidsbeheerders
Bylaag B: Getransformeerde ISO-Afstand-kurwes
Bylaag D: Veiligheidsbeheerder Besonderhede
Bylaag E: Kontroleerderparameters
IV. OD-KORRIDORS EN GEWENSTE ORIËNTASIES
A. Definieer OD-korridors
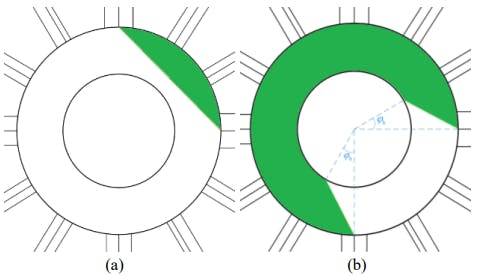
Sigbare bestemming: Vir die eerste tipe OD-pare waar die oorsprong en bestemming relatief naby aan mekaar is en die bestemming sigbaar is vanaf die oorsprong, is die kortste en eenvoudigste manier om daar te kom om 'n direkte pad in die omgewing van of op te neem. die buitenste grens van die rotonde, vermy uitstappies na die binneste deel van die rotonde. In hierdie sin is 'n eenvoudige keuse om 'n reguit lyn te oorweeg wat die mees linkse punt van die oorsprongtak verbind met die mees linkse punt van die bestemmingstak as die binneste korridorgrens, sien Fig. 5(a). As so 'n gang te smal is vir 'n sekere OD, kan die binnegrens deur 'n boog vervang word. In die geval van Place Charles de Gaulle-rotonde is die bestemming sigbaar vanaf die oorsprong as dit tot 3 takke van die oorsprong af is. As die uitgangstak net na die ingangstak is, word die tweede opsie (boog in plaas van 'n lyn) vir die binnegrens gebruik.
B. Spesifikasie van gewenste oriëntasies
Die minimum afwykingsprobleem: 'n Pad wat enige posisie in die rotonde verbind met 'n bestemming met minimum afwyking van sirkelbeweging is interessant omdat die meeste voertuie roteer en as hul oriëntasies naby aan die sirkelhoek is, dan is hulle naby mekaar, iets wat versag voertuigkonflik en die sterkte van enige vereiste botsingvermydingsmaneuvers. In [35] dui die afgeleide oplossing van 'n optimale beheerprobleem aan dat afwykings van die sirkelhoek geminimaliseer word indien 'n voertuig 'n konstante afwyking op sy pad van enige posisie na die bestemming behou en hierdie konstante afwyking is
Hierdie vraestel is onder CC 4.0 lisensie.
L O A D I N G
. . . comments & more!
. . . comments & more!



