













































Jan 01, 1970
कम्प्लेक्स राउन्डअबाउट्समा सवारी साधनको प्रवाहलाई अनुकूलन गर्दै: OD कोरिडोर र इच्छित अभिमुखीकरण द्वारा@escholar
कम्प्लेक्स राउन्डअबाउट्समा सवारी साधनको प्रवाहलाई अनुकूलन गर्दै: OD कोरिडोर र इच्छित अभिमुखीकरण
धेरै लामो; पढ्नकाे लागि
कागजले OD कोरिडोरहरू परिभाषित गर्न र जटिल राउन्डअबाउटहरू नेभिगेट गर्ने स्वचालित सवारीहरूको लागि वांछित अभिमुखीकरणहरू निर्दिष्ट गर्ने रणनीतिलाई रूपरेखा दिन्छ। यसले गन्तव्य दृश्यताको आधारमा OD कोरिडोरहरूलाई वर्गीकृत गर्दछ र भारित औसत अभिमुखीकरणहरू प्रयोग गर्दछ जुन छोटो बाटोको दक्षतालाई गोलाकार गतिबाट न्यूनतम विचलनमा सन्तुलनमा राख्न, सुरक्षा र ट्राफिक प्रवाह बढाउँछ।लेखकहरू:
(1) मेहदी नादेरी;
(२) मार्कोस पापेजोर्जियो;
(3) Dimitrios Troullinos;
(4) आइसन काराफिलिस;
(5) Ioannis Papamichail।
लिङ्कहरूको तालिका
Nonlinear प्रतिक्रिया नियन्त्रण
OD कोरिडोर र इच्छित अभिमुखीकरण
परिशिष्ट ए: टक्कर पत्ता लगाउने
परिशिष्ट B: रूपान्तरित ISO-दूरी वक्र
परिशिष्ट D: सुरक्षा नियन्त्रक विवरणहरू
परिशिष्ट E: नियन्त्रक प्यारामिटरहरू
IV। ओडी कोरिडोर र वांछित अभिमुखीकरणहरू
A. OD कोरिडोरहरू परिभाषित गर्दै
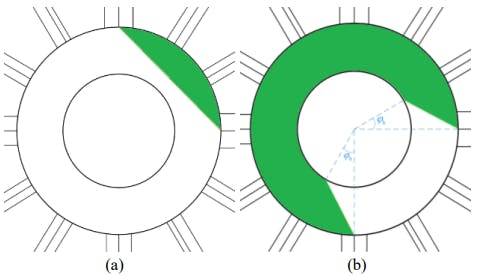
एक OD कोरिडोर राउन्डअबाउट सतहको एक भाग हो, जहाँ सम्बन्धित OD भएका सवारी साधनहरूलाई ड्राइभ गर्न अनुमति दिइन्छ। ठूला राउन्डअबाउटहरूमा OD जोडीहरूको ठूलो संख्यालाई ध्यानमा राख्दै, मानव चालक निर्णयहरूको नजिक आउने स्थापित नियमहरू अनुरूप सम्बन्धित कोरिडोरहरू स्वचालित रूपमा स्थापित हुनु बुद्धिमानी छ। त्यस्ता करिडोरहरूले राउन्डअबाउटमा सवारी साधनहरू बीचको द्वन्द्व कम गर्न र ट्राफिक प्रवाह सुधार गर्न मद्दत गर्न सक्छ। उदाहरणका लागि, यदि कुनै सवारीको गन्तव्य यसको प्रवेशद्वार शाखाको नजिक छ भने, भित्री राउन्डअबाउट सीमाको नजिक ड्राइभ गर्नबाट जोगिनु तार्किक देखिन्छ, जसले सवारीलाई जोखिमपूर्ण र अर्ध-सीधा आवतजावतमा अवरोध पुर्याउँछ। राउन्डअबाउटको बाहिरी सिमानालाई चित्र 5 मा देखिए अनुसार सबै OD कोरिडोरहरूको बाहिरी सिमाना मानिन्छ। यसको विपरीत, राम्रो पूर्वाधार उपयोग प्राप्त गर्न कोरिडोरको भित्री सिमानाहरूको थप सान्दर्भिक परिभाषा गरिएको छ। पहिलो, हामी OD लाई दुई प्रकारमा वर्गीकरण गर्छौं: (1) गन्तव्य उत्पत्तिबाट देखिने छ (चित्र 5(a)); र (2) गन्तव्य उत्पत्तिबाट देखिँदैन (चित्र 5(b))।
देखिने गन्तव्य: पहिलो प्रकारका ओडी जोडीहरूका लागि जहाँ उत्पत्ति र गन्तव्य एकअर्कासँग तुलनात्मक रूपमा नजिक छन् र गन्तव्य उत्पत्तिबाट देखिने छ, त्यहाँ पुग्नको लागि सबैभन्दा छोटो र सरल मार्ग भनेको छेउमा वा नजिकको सिधा बाटो लिनु हो। राउन्डअबाउटको बाहिरी सिमाना, राउन्डअबाउटको भित्री भागमा भ्रमणहरू बेवास्ता गर्दै। यस अर्थमा, एउटा सरल छनोट भनेको भित्री करिडोर सीमाको रूपमा गन्तव्य शाखाको बायाँ-सबैभन्दा बायाँ बिन्दुसँग मूल शाखाको बायाँ बिन्दु जोड्ने सीधा रेखालाई विचार गर्नु हो, चित्र 5(a) हेर्नुहोस्। यदि यस्तो कोरिडोर निश्चित OD को लागि धेरै साँघुरो छ भने, भित्री सीमा चाप द्वारा प्रतिस्थापन गर्न सकिन्छ। प्लेस चार्ल्स डे गौले राउन्डअबाउटको मामलामा, गन्तव्य मूलबाट देखिने छ यदि यो मूलबाट 3 शाखाहरू टाढा छ भने। यदि बाहिर निस्कने शाखा प्रवेश शाखा पछि मात्र छ भने, दोस्रो विकल्प (रेखाको सट्टा चाप) भित्री सीमाको लागि प्रयोग गरिन्छ।
B. इच्छित अभिमुखीकरण निर्दिष्ट गर्दै
सवारी साधनको ओडी करिडोर भित्र ड्राइभ गर्दा यसको आवागमनको दिशा बारे केही दिशानिर्देश हुनुपर्छ, ताकि यो पहिले राउन्डअबाउट ट्राफिकमा विलीन हुन्छ, त्यसपछि आफ्नो गन्तव्यतिर अगाडि बढ्छ र अन्ततः बाहिर निस्कन्छ। यो मार्गनिर्देशन सवारी साधनको हालको स्थिति र यसको गन्तव्यको आधारमा गणना गरिएको सवारी साधनको लागि वांछित अभिमुखीकरणको रूपमा प्रदान गरिएको छ र सवारी साधन चलाउने निर्णयहरूलाई प्रभाव पार्न NLFC लाई खुवाइन्छ। तसर्थ, अन्य सवारी साधनको अनुपस्थितिमा, सवारीले आफ्नो निकास तर्फ स्थिति-निर्भर इच्छित अभिमुखीकरण द्वारा लगाएको मार्ग पछ्याउनेछ। अन्य सवारी साधनहरूको उपस्थितिमा, सवारी साधनले त्यो बाटोबाट विचलित हुन सक्छ, उदाहरणका लागि अन्य सवारीहरूसँग टक्करबाट बच्नको लागि, तर सधैं यसको वर्तमान स्थिति अनुरूप इच्छित अभिमुखीकरण हुनेछ।
यस कार्यमा, हामी दुई अभिमुखीकरणहरूको भारित औसत प्रयोग गर्छौं, जुन गन्तव्य समस्याको छोटो मार्गको सम्बन्धित इष्टतम समाधानहरू हुन्; र गोलाकार गति समस्याबाट न्यूनतम विचलन, विवरणहरू हेर्नुहोस् [35]। सबैभन्दा छोटो मार्ग समस्या: कुनै पनि राउन्डअबाउट स्थितिलाई निश्चित गन्तव्यसँग जोड्ने छोटो बाटोको स्पष्ट भौतिक अर्थ हुन्छ; अन्य सवारी साधनको अनुपस्थितिमा सवारी साधनले आफ्नो गन्तव्यमा पुग्ने छोटो बाटोमा चलाउन चासो राख्छ। नोट गर्नुहोस्, तथापि, यस्तो बाटोले गोलाकार कोणबाट बलियो विचलनहरू समावेश गर्न सक्छ, जसले अन्य सवारी साधनहरूको उपस्थितिमा घुम्ने सवारीहरूसँग झगडा बढाउँछ, जसले ढिलाइ र टक्करको जोखिम बढाउँछ। छोटो बाटो अभिमुखीकरणहरू सजिलैसँग दुई अवस्थाहरू बीच भेद गरेर व्युत्पन्न हुन्छन्:
यस भागमा वांछित अभिमुखीकरण ट्यान्जेन्टको ढलान हो। दोस्रो भागमा, मार्गले भित्री सीमालाई पछ्याउँछ, अर्थात्, इच्छित अभिमुखीकरण गोलाकार कोण हो, जबसम्म गन्तव्य देखिँदैन; त्यसपछि हामीसँग फेरि देखिने गन्तव्यको केस छ, र इच्छित अभिमुखीकरण एक्जिट पोइन्टमा जोडिएको रेखाको ढलान हो, चित्र 7 हेर्नुहोस्।
न्यूनतम विचलन समस्या: गोलाकार गतिबाट न्यूनतम विचलन भएको गन्तव्यसँग राउन्डअबाउटमा कुनै पनि स्थानलाई जोड्ने बाटो रोचक छ किनभने धेरैजसो सवारी साधनहरू घुमिरहेका छन् र यदि तिनीहरूको अभिमुखीकरण गोलाकार कोणको नजिक छ भने, तिनीहरू एकअर्काको नजिक छन्। सवारीसाधनको द्वन्द्व र कुनै पनि आवश्यक टक्करबाट बच्ने युक्तिहरूको बललाई कम गर्छ। [३५] मा, इष्टतम नियन्त्रण समस्याको व्युत्पन्न समाधानले संकेत गर्दछ कि गोलाकार कोणबाट विचलन कम हुन्छ यदि सवारीले कुनै पनि स्थानबाट गन्तव्यमा आफ्नो मार्गमा स्थिर विचलन कायम राख्छ र यो स्थिर विचलन हो।
यो कागज CC 4.0 लाइसेन्स अन्तर्गत छ।
L O A D I N G
. . . comments & more!
. . . comments & more!



