




Optimalizace toku vozidel na složitých kruhových objezdech: vnější koridory a požadované orientace podle@escholar

Optimalizace toku vozidel na složitých kruhových objezdech: vnější koridory a požadované orientace
podle EScholar: Electronic Academic Papers for Scholars4m2024/09/02



















Příliš dlouho; Číst
Článek nastiňuje strategii pro definování OD koridorů a specifikaci požadovaných orientací pro automatizovaná vozidla projíždějící složitými kruhovými objezdy. Klasifikuje koridory vnějšího průměru na základě viditelnosti cíle a používá vážené průměrné orientace k vyrovnání účinnosti nejkratší trasy s minimální odchylkou od kruhového pohybu, čímž zvyšuje bezpečnost a plynulost dopravy.


autoři:
(1) Mehdi Naderi; (2) Markos Papageorgiou; (3) Dimitrios Troullinos; (4) Iasson Karafyllis; (5) Ioannis Papamichail.Tabulka odkazů
Nelineární kontrola zpětné vazby
OD koridory a požadované orientace
Hraniční a bezpečnostní regulátory
Příloha B: Transformované křivky vzdálenosti ISO
Dodatek D: Podrobnosti bezpečnostního ovladače
Příloha E: Parametry regulátoru
IV. OD CHODBY A POŽADOVANÉ ORIENTACE
A. Definování OD koridorů
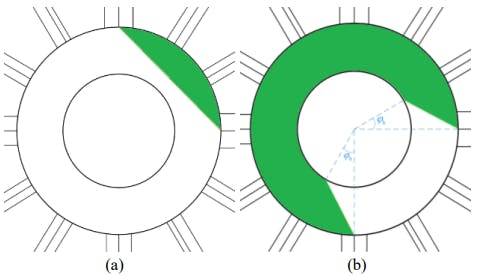
Viditelný cíl: U prvního typu párů OD, kde jsou výchozí a cílový bod relativně blízko u sebe a cíl je viditelný z místa počátku, je nejkratší a nejjednodušší způsob, jak se tam dostat, jet přímou cestou v blízkosti nebo na vnější hranici kruhového objezdu, vyhýbání se výjezdům do vnitřní části kruhového objezdu. V tomto smyslu je jednoduchou volbou považovat za vnitřní hranici koridoru přímku spojující krajní levý bod počáteční větve s krajním levým bodem cílové větve, viz obr. 5(a). Pokud je takový koridor příliš úzký pro určitou vnější hranici, může být vnitřní hranice nahrazena obloukem. V případě kruhového objezdu Place Charles de Gaulle je cíl viditelný z výchozího bodu, pokud je vzdálen až 3 odbočky od výchozího bodu. Pokud je výstupní větev hned za vstupní větví, použije se pro vnitřní hranici druhá možnost (oblouk místo čáry).


B. Zadání požadovaných orientací









Problém minimální odchylky: Cesta spojující libovolnou pozici na kruhovém objezdu s cílem s minimální odchylkou od kruhového pohybu je zajímavá, protože většina vozidel se otáčí a pokud jsou jejich orientace blízké kruhovému úhlu, pak jsou blízko sebe, něco, co zmírňuje konflikty vozidel a sílu jakýchkoli požadovaných manévrů pro vyhnutí se srážce. V [35] odvozené řešení optimálního řídicího problému ukazuje, že odchylky od kruhového úhlu jsou minimalizovány, pokud si vozidlo zachovává konstantní odchylku na své cestě z libovolné polohy do cíle a tato konstantní odchylka je


Tento dokument je pod licencí CC 4.0.
L O A D I N G
. . . comments & more!
. . . comments & more!




