













































Jan 01, 1970
Optimizarea fluxului de vehicule în sensurile giratorii complexe: coridoare OD și orientări dorite de@escholar
Optimizarea fluxului de vehicule în sensurile giratorii complexe: coridoare OD și orientări dorite
de EScholar: Electronic Academic Papers for Scholars4m2024/09/02
Prea lung; A citi
Lucrarea conturează o strategie pentru definirea coridoarelor OD și specificarea orientărilor dorite pentru vehiculele automate care navighează în sensurile giratorii complexe. Clasifică coridoarele OD în funcție de vizibilitatea destinației și utilizează orientări medii ponderate pentru a echilibra eficiența celei mai scurte trasee cu o abatere minimă de la mișcarea circulară, sporind siguranța și fluxul de trafic.Autori:
(1) Mehdi Naderi; (2) Markos Papageorgiou; (3) Dimitrios Troullinos; (4) Iasson Karafyllis; (5) Ioannis Papamichail.Tabelul de legături
Controlul neliniar al feedback-ului
Coridoare OD și orientări dorite
Controloare de delimitare și siguranță
Anexa A: Detectarea coliziunilor
Anexa B: Curbe ISO-Distanță transformate
Anexa D: Detalii controler de siguranță
Anexa E: Parametrii controlerului
IV. CORIDOARE OD ȘI ORIENTĂRI DEZIRATE
A. Definirea coridoarelor OD
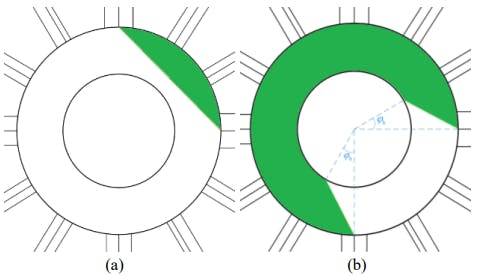
Destinație vizibilă: pentru primul tip de cupluri OD în care originea și destinația sunt relativ aproape una de cealaltă și destinația este vizibilă de la origine, cel mai scurt și simplu mod de a ajunge acolo este să urmezi o cale directă în vecinătatea sau pe limita exterioară a sensului giratoriu, evitând excursiile în partea interioară a sensului giratoriu. În acest sens, o alegere simplă este de a considera o linie dreaptă care leagă punctul cel mai din stânga al ramului de origine cu punctul cel mai din stânga al ramificației de destinație ca graniță a coridorului interior, vezi Fig. 5(a). Dacă un astfel de coridor este prea îngust pentru un anumit OD, granița interioară poate fi înlocuită cu un arc. În cazul sensului giratoriu Place Charles de Gaulle, destinația este vizibilă de la origine dacă se află la până la 3 ramuri distanță de origine. Dacă ramura de ieșire este imediat după ramura de intrare, a doua opțiune (arc în loc de linie) este utilizată pentru limita interioară.
B. Specificarea orientărilor dorite
Problema deviației minime: O cale care leagă orice poziție din sensul giratoriu cu o destinație cu abatere minimă de la mișcarea circulară este interesantă deoarece majoritatea vehiculelor se rotesc și dacă orientările lor sunt apropiate de unghiul circular, atunci sunt aproape unul de celălalt, ceva care atenuează conflictele vehiculelor și puterea oricăror manevre necesare de evitare a coliziunilor. În [35], soluția derivată a unei probleme de control optim indică faptul că abaterile de la unghiul circular sunt minimizate dacă un vehicul păstrează o abatere constantă pe calea sa de la orice poziție la destinație și această abatere constantă este
Această lucrare este sub licență CC 4.0.
L O A D I N G
. . . comments & more!
. . . comments & more!



