




Optimizimi i fluksit të automjeteve në rrethrrotullime komplekse: korridoret OD dhe orientimet e dëshiruara nga@escholar

Optimizimi i fluksit të automjeteve në rrethrrotullime komplekse: korridoret OD dhe orientimet e dëshiruara
nga EScholar: Electronic Academic Papers for Scholars4m2024/09/02



















Shume gjate; Te lexosh
Punimi përshkruan një strategji për përcaktimin e korridoreve OD dhe specifikimin e orientimeve të dëshiruara për automjetet e automatizuara që lundrojnë në rrethrrotullime komplekse. Ai kategorizon korridoret OD bazuar në dukshmërinë e destinacionit dhe përdor orientimet mesatare të ponderuara për të balancuar efikasitetin e rrugës më të shkurtër me devijime minimale nga lëvizja rrethore, duke rritur sigurinë dhe rrjedhën e trafikut.


Autorët:
(1) Mehdi Naderi; (2) Markos Papageorgiou; (3) Dimitrios Troullinos; (4) Iasson Karafyllis; (5) Joani Papamichail.Tabela e lidhjeve
Kontrolli jolinear i reagimeve
Korridoret OD dhe orientimet e dëshiruara
Kontrollorët e kufirit dhe sigurisë
Shtojca A: Zbulimi i përplasjeve
Shtojca B: Lakoret e transformuara ISO-Distanca
Shtojca D: Detajet e Kontrolluesit të Sigurisë
Shtojca E: Parametrat e kontrolluesit
IV. KORRIDORET DHE ORIENTIMET E DËSHIRATA
A. Përcaktimi i korridoreve OD
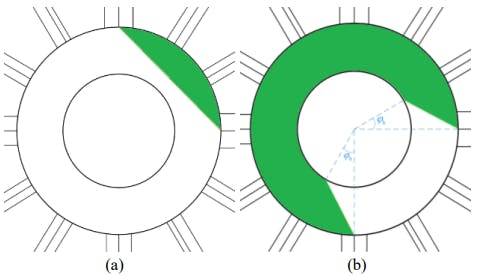
Destinacioni i dukshëm: Për llojin e parë të çifteve OD ku origjina dhe destinacioni janë relativisht afër njëra-tjetrës dhe destinacioni është i dukshëm nga origjina, mënyra më e shkurtër dhe më e thjeshtë për të arritur atje është të marrësh një rrugë të drejtpërdrejtë në afërsi ose në kufiri i jashtëm i rrethrrotullimit, duke shmangur ekskursionet në pjesën e brendshme të rrethrrotullimit. Në këtë kuptim, një zgjedhje e thjeshtë është të konsideroni një vijë të drejtë që lidh pikën më të majtë të degës së origjinës me pikën më të majtë të degës së destinacionit si kufiri i brendshëm i korridorit, shih Fig. 5(a). Nëse një korridor i tillë është shumë i ngushtë për një OD të caktuar, kufiri i brendshëm mund të zëvendësohet nga një hark. Për rastin e rrethrrotullimit të Place Charles de Gaulle, destinacioni është i dukshëm nga origjina nëse është deri në 3 degë larg nga origjina. Nëse dega e daljes është menjëherë pas degës së hyrjes, opsioni i dytë (harku në vend të një vije) përdoret për kufirin e brendshëm.


B. Specifikimi i orientimeve të dëshiruara









Problemi i devijimit minimal: Një shteg që lidh çdo pozicion në rrethrrotullim me një destinacion me devijim minimal nga lëvizja rrethore është interesant sepse shumica e automjeteve rrotullohen dhe nëse orientimet e tyre janë afër këndit rrethor, atëherë ato janë afër njëri-tjetrit, diçka që zbut konfliktet e automjeteve dhe fuqinë e çdo manovre të nevojshme për shmangien e përplasjeve. Në [35], zgjidhja e nxjerrë e një problemi kontrolli optimal tregon se devijimet nga këndi rrethor minimizohen nëse një automjet ruan një devijim konstant në rrugën e tij nga çdo pozicion në destinacion dhe ky devijim konstant është


Ky dokument është nën licencën CC 4.0.
L O A D I N G
. . . comments & more!
. . . comments & more!




