













































Jan 01, 1970
Optimización del flujo de vehículos en rotondas complejas: corredores OD y orientaciones deseadas por@escholar
Optimización del flujo de vehículos en rotondas complejas: corredores OD y orientaciones deseadas
por EScholar: Electronic Academic Papers for Scholars4m2024/09/02
Demasiado Largo; Para Leer
El documento describe una estrategia para definir corredores de OD y especificar las orientaciones deseadas para vehículos automatizados que circulan por rotondas complejas. Clasifica los corredores de OD en función de la visibilidad del destino y utiliza orientaciones promedio ponderadas para equilibrar la eficiencia de la ruta más corta con una desviación mínima del movimiento circular, lo que mejora la seguridad y el flujo de tráfico.Autores:
(1) Mehdi Naderi; (2) Marcos Papageorgiou; (3) Dimitrios Troullinos; (4) Iasson Karafyllis; (5) Juan Papamichail.Tabla de enlaces
El control de retroalimentación no lineal
Corredores OD y orientaciones deseadas
Controladores de límites y seguridad
Apéndice A: Detección de colisiones
Apéndice B: Curvas de distancia ISO transformadas
Apéndice D: Detalles del controlador de seguridad
Apéndice E: Parámetros del controlador
IV. CORREDORES OD Y ORIENTACIONES DESEADAS
A. Definición de corredores OD
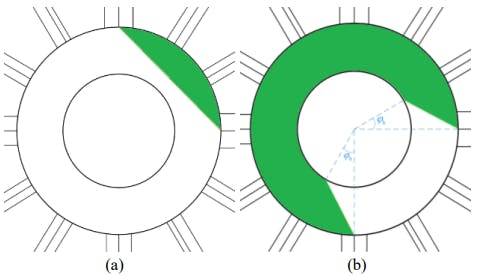
Destino visible: Para el primer tipo de parejas de OD donde el origen y el destino están relativamente cerca uno del otro y el destino es visible desde el origen, la forma más corta y sencilla de llegar es tomar un camino directo en las proximidades o en el límite exterior de la rotonda, evitando excursiones a la parte interior de la rotonda. En este sentido, una opción sencilla es considerar una línea recta que conecta el punto más a la izquierda de la rama de origen con el punto más a la izquierda de la rama de destino como el límite interior del corredor, véase la Fig. 5(a). Si dicho corredor es demasiado estrecho para un determinado OD, el límite interior puede sustituirse por un arco. Para el caso de la rotonda de Place Charles de Gaulle, el destino es visible desde el origen si se encuentra a hasta 3 ramas de distancia del origen. Si la rama de salida está justo después de la rama de entrada, se utiliza la segunda opción (arco en lugar de una línea) para el límite interior.
B. Especificación de las orientaciones deseadas
El problema de la desviación mínima: Un camino que conecta cualquier posición en la rotonda con un destino con una desviación mínima del movimiento circular es interesante porque la mayoría de los vehículos están rotando y si sus orientaciones están cerca del ángulo circular, entonces están cerca uno del otro, algo que mitiga los conflictos entre vehículos y la fuerza de cualquier maniobra requerida para evitar colisiones. En [35], la solución derivada de un problema de control óptimo indica que las desviaciones del ángulo circular se minimizan si un vehículo mantiene una desviación constante en su camino desde cualquier posición hasta el destino y esta desviación constante es
Este artículo está bajo licencia CC 4.0.
L O A D I N G
. . . comments & more!
. . . comments & more!



