













































Jan 01, 1970
Tối ưu hóa luồng xe trong các vòng xoay phức tạp: Hành lang OD và hướng mong muốn từ tác giả@escholar
Tối ưu hóa luồng xe trong các vòng xoay phức tạp: Hành lang OD và hướng mong muốn
từ tác giả EScholar: Electronic Academic Papers for Scholars4m2024/09/02
dài quá đọc không nổi
Bài báo phác thảo một chiến lược để xác định hành lang OD và chỉ định hướng mong muốn cho các phương tiện tự động điều hướng qua các vòng xoay phức tạp. Bài báo phân loại các hành lang OD dựa trên khả năng hiển thị đích đến và sử dụng các hướng trung bình có trọng số để cân bằng hiệu quả đường đi ngắn nhất với độ lệch tối thiểu so với chuyển động tròn, tăng cường an toàn và lưu lượng giao thông.Tác giả:
(1) Mehdi Naderi; (2) Markos Papageorgiou; (3) Dimitrios Troullinos; (4) Iasson Karafyllis; (5) Ioannis Papamichail.Bảng liên kết
Kiểm soát phản hồi phi tuyến tính
Hành lang OD và hướng mong muốn
Người kiểm soát ranh giới và an toàn
Phụ lục B: Đường cong ISO-Khoảng cách được chuyển đổi
Phụ lục D: Chi tiết về Bộ điều khiển an toàn
Phụ lục E: Tham số bộ điều khiển
IV. HÀNH LANG OD VÀ HƯỚNG MONG MUỐN
A. Định nghĩa hành lang OD
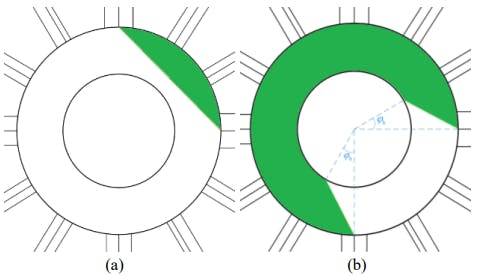
Điểm đến có thể nhìn thấy: Đối với loại cặp OD đầu tiên, trong đó điểm xuất phát và điểm đến tương đối gần nhau và có thể nhìn thấy điểm đến từ điểm xuất phát, cách ngắn nhất và đơn giản nhất để đến đó là đi theo đường thẳng gần hoặc trên ranh giới ngoài của vòng xoay, tránh đi vào phần bên trong của vòng xoay. Theo nghĩa này, một lựa chọn đơn giản là coi một đường thẳng nối điểm cực trái của nhánh gốc với điểm cực trái của nhánh đích là ranh giới hành lang bên trong, xem Hình 5(a). Nếu hành lang như vậy quá hẹp đối với một OD nhất định, ranh giới bên trong có thể được thay thế bằng một cung tròn. Đối với trường hợp vòng xoay Place Charles de Gaulle, điểm đến có thể nhìn thấy từ điểm xuất phát nếu nó cách điểm xuất phát tối đa 3 nhánh. Nếu nhánh ra nằm ngay sau nhánh vào, thì tùy chọn thứ hai (cung tròn thay vì đường thẳng) được sử dụng cho ranh giới bên trong.
B. Chỉ định hướng mong muốn
Bài toán độ lệch tối thiểu: Một đường dẫn kết nối bất kỳ vị trí nào trong vòng xoay với đích đến với độ lệch tối thiểu so với chuyển động tròn là điều thú vị vì hầu hết các phương tiện đều đang quay và nếu hướng của chúng gần với góc tròn, thì chúng gần nhau, điều này làm giảm xung đột giữa các phương tiện và sức mạnh của bất kỳ động tác tránh va chạm nào cần thiết. Trong [35], giải pháp được suy ra của một bài toán điều khiển tối ưu chỉ ra rằng độ lệch so với góc tròn được giảm thiểu nếu một phương tiện duy trì độ lệch không đổi trên đường đi của nó từ bất kỳ vị trí nào đến đích và độ lệch không đổi này là
Bài báo này theo giấy phép CC 4.0.
L O A D I N G
. . . comments & more!
. . . comments & more!
About Author
chuyên mục
NHỮNG BÀI VIẾT LIÊN QUAN
85 Stories To Learn About Travel
#travel

72 Stories To Learn About Adam Smith #adam-smith
Jan 01, 1970


