













































Jan 01, 1970
Optimisation des flux de véhicules dans les ronds-points complexes : couloirs extérieurs et orientations souhaitées par@escholar
Optimisation des flux de véhicules dans les ronds-points complexes : couloirs extérieurs et orientations souhaitées
par EScholar: Electronic Academic Papers for Scholars4m2024/09/02
Trop long; Pour lire
L'article décrit une stratégie pour définir les couloirs OD et spécifier les orientations souhaitées pour les véhicules automatisés naviguant dans des ronds-points complexes. Il catégorise les couloirs OD en fonction de la visibilité de la destination et utilise des orientations moyennes pondérées pour équilibrer l'efficacité du chemin le plus court avec un écart minimal par rapport au mouvement circulaire, améliorant ainsi la sécurité et la fluidité du trafic.Auteurs:
(1) Mehdi Naderi; (2) Markos Papageorgiou; (3) Dimitrios Troullinos; (4) Iasson Karafyllis; (5) Ioannis Papamichail.Table des liens
Le contrôle par rétroaction non linéaire
Couloirs OD et orientations souhaitées
Contrôleurs de limites et de sécurité
Annexe A : Détection de collision
Annexe B : Courbes de distance ISO transformées
Annexe D : Détails du contrôleur de sécurité
Annexe E : Paramètres du contrôleur
IV. COULOIRS OD ET ORIENTATIONS SOUHAITÉES
A. Définition des corridors OD
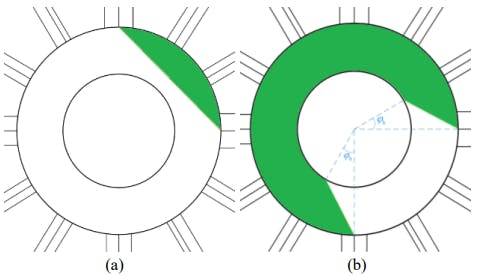
Destination visible : Pour le premier type de couples OD où l'origine et la destination sont relativement proches l'une de l'autre et la destination est visible depuis l'origine, le moyen le plus court et le plus simple d'y parvenir est de prendre un chemin direct à proximité ou sur la limite extérieure du rond-point, en évitant les excursions vers la partie intérieure du rond-point. Dans ce sens, un choix simple consiste à considérer une ligne droite reliant le point le plus à gauche de la branche d'origine au point le plus à gauche de la branche de destination comme limite intérieure du corridor, voir la figure 5(a). Si un tel corridor est trop étroit pour un certain OD, la limite intérieure peut être remplacée par un arc. Dans le cas du rond-point de la Place Charles de Gaulle, la destination est visible depuis l'origine si elle se trouve à 3 branches maximum de l'origine. Si la branche de sortie est juste après la branche d'entrée, la deuxième option (arc au lieu d'une ligne) est utilisée pour la limite intérieure.
B. Spécification des orientations souhaitées
Le problème de déviation minimale : un chemin reliant n'importe quelle position du rond-point à une destination avec une déviation minimale du mouvement circulaire est intéressant car la plupart des véhicules tournent et si leurs orientations sont proches de l'angle circulaire, alors ils sont proches les uns des autres, ce qui atténue les conflits entre véhicules et la force de toute manœuvre d'évitement de collision requise. Dans [35], la solution dérivée d'un problème de contrôle optimal indique que les déviations par rapport à l'angle circulaire sont minimisées si un véhicule conserve une déviation constante sur son chemin de n'importe quelle position à la destination et que cette déviation constante est
Cet article est sous licence CC 4.0.
L O A D I N G
. . . comments & more!
. . . comments & more!



