













































Jan 01, 1970
Optimering af køretøjsflow i komplekse rundkørsler: OD-korridorer og ønskede orienteringer ved@escholar
Optimering af køretøjsflow i komplekse rundkørsler: OD-korridorer og ønskede orienteringer
ved EScholar: Electronic Academic Papers for Scholars4m2024/09/02
For langt; At læse
Papiret skitserer en strategi til at definere OD-korridorer og specificere ønskede orienteringer for automatiserede køretøjer, der navigerer i komplekse rundkørsler. Den kategoriserer OD-korridorer baseret på destinationssynlighed og bruger vægtede gennemsnitlige orienteringer til at balancere den korteste vejs effektivitet med minimal afvigelse fra cirkulær bevægelse, hvilket øger sikkerheden og trafikstrømmen.Forfattere:
(1) Mehdi Naderi; (2) Markos Papageorgiou; (3) Dimitrios Troullinos; (4) Iasson Karafyllis; (5) Ioannis Papamichail.Tabel over links
Den ikke-lineære feedbackkontrol
OD korridorer og ønskede orienteringer
Grænse- og sikkerhedskontrollører
Bilag B: Transformerede ISO-afstandskurver
Bilag D: Sikkerhedscontrollerdetaljer
Appendiks E: Controller-parametre
IV. OD-KORRIDORER OG ØNSKEDE ORIENTERINGER
A. Definition af OD-korridorer
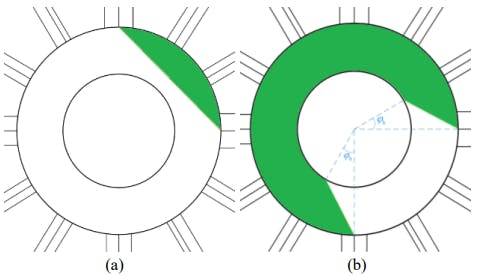
Synlig destination: For den første type OD-par, hvor oprindelse og destination er relativt tæt på hinanden, og destinationen er synlig fra udgangspunktet, er den korteste og enkleste vej dertil at tage en direkte vej i nærheden af eller på rundkørslens ydre grænse, så man undgår udflugter til den inderste del af rundkørslen. I denne forstand er et simpelt valg at betragte en ret linje, der forbinder det længst venstre punkt af oprindelsesgrenen med punktet længst til venstre på destinationsgrenen som den indre korridorgrænse, se fig. 5(a). Hvis en sådan korridor er for smal til en bestemt OD, kan den indre grænse erstattes af en bue. I tilfældet med Place Charles de Gaulle-rundkørslen er destinationen synlig fra udgangspunktet, hvis det er op til 3 grene væk fra udgangspunktet. Hvis udgangsgrenen er lige efter indgangsgrenen, bruges den anden mulighed (bue i stedet for en linje) for den indre grænse.
B. Angivelse af ønskede orienteringer
Minimumsafvigelsesproblemet: En sti, der forbinder enhver position i rundkørslen med en destination med minimal afvigelse fra cirkulær bevægelse er interessant, fordi de fleste køretøjer roterer, og hvis deres orientering er tæt på den cirkulære vinkel, så er de tæt på hinanden, noget der mindsker køretøjskonflikter og styrken af alle nødvendige kollisions-undgåelsesmanøvrer. I [35] indikerer den afledte løsning af et optimalt kontrolproblem, at afvigelser fra den cirkulære vinkel minimeres, hvis et køretøj bevarer en konstant afvigelse på sin vej fra enhver position til destinationen, og denne konstante afvigelse er
Dette papir er under CC 4.0-licens.
L O A D I N G
. . . comments & more!
. . . comments & more!



