













































Jan 01, 1970
複雑なラウンドアバウトにおける車両の流れの最適化: OD 通道と望ましい目标方向 に@escholar
複雑なラウンドアバウトにおける車両の流れの最適化: OD 通路と望ましい方向
に EScholar: Electronic Academic Papers for Scholars4m2024/09/02
長すぎる; 読むには
この論文では、OD 回廊を定義し、複雑なラウンドアバウトを走行する自動運転車両に望ましい方向を指定するための戦略を概説しています。OD 回廊を目的地の視認性に基づいて分類し、加重平均方向を使用して最短経路の効率と円運動からの最小偏差のバランスを取り、安全性と交通の流れを強化します。著者:
(1)メフディ・ナデリ(2)マルコス・パパゲオルギウ(3)ディミトリオス・トルリノス(4)イアソン・カラフィリス(5)イオアニス・パパミハイルリンク一覧
IV. OD回廊と望ましい方向
A. OD回廊の定義
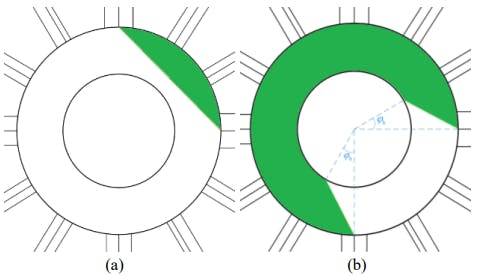
目に見える目的地:起点と目的地が比較的近く、起点から目的地が見える最初のタイプの OD カップルの場合、そこに到達する最も短くて簡単な方法は、ラウンドアバウトの内側部分への逸脱を避けて、ラウンドアバウトの外側境界の近くまたは外側境界上を直線で進むことです。この意味で、単純な選択は、起点ブランチの左端のポイントと目的地ブランチの左端のポイントを結ぶ直線を内側の回廊境界と見なすことです (図 5(a) を参照)。このような回廊が特定の OD に対して狭すぎる場合は、内側の境界を円弧に置き換えることができます。シャルル・ド・ゴール広場のラウンドアバウトの場合、起点から目的地が 3 つまでのブランチであれば、起点から目的地が見えます。出口ブランチが入口ブランチのすぐ後にある場合は、内側の境界に 2 番目のオプション (線ではなく円弧) が使用されます。
B. 望ましい方向の指定
最小偏差問題:ラウンドアバウト内の任意の位置と目的地を結ぶ円運動からの偏差が最小となる経路は興味深い。なぜなら、ほとんどの車両は回転しており、その向きが円角に近い場合、車両同士が接近しているため、車両の衝突が緩和され、必要な衝突回避操作の強度が増すからである。[35]では、最適制御問題の導出解は、車両が任意の位置から目的地までの経路上で一定の偏差を維持し、この一定の偏差が
この論文はCC 4.0ライセンスの下で。
L O A D I N G
. . . comments & more!
. . . comments & more!
About Author
ラベル
関連ストーリー

海を航海する: データレイクを使用した本番環境レベルの RAG アプリケーションの開発 #minio
Jan 01, 1970

AI の力を解き放つ。最先端技術の体系的レビュー: 概要と序論 #ai
Jan 01, 1970

